|
I am a postdoc at Stanford University, advised by Prof. Marco Pavone. The goal of my research is to develop broadly capable autonomous systems, with a particular emphasis autonomous aerospace robotics and future mobility systems. I completed my PhD at the Technical University of Denmark (DTU), working with Prof. Francisco Camara Pereira, Prof. Filipe Rodrigues, and Prof. Dario Pacino. During my PhD, I was fortunate to spend my time in the Machine Learning for Smart Mobility Lab. Before my PhD, I spent some time in Amazon's Operations Research Team. Email / Twitter / Google Scholar / Github / CV / LinkedIn I am on the 2025-2026 faculty job market! |

|
|
The goal of my research is to develop the algorithmic foundations and system-level methodologies that enable AI-powered autonomous systems to operate safely, efficiently, and reliably in high-stakes environments. |
|
Stanford Robotics Seminar | Space Autonomy Through the Lens of Foundation Models. 
ITSC 2024 | Tutorial on Graph Reinforcement Learning |
|
|
|
|
|
Stanford AA203: Optimal and Learning-based Control - Spring 2025 Stanford AA203: Optimal and Learning-based Control - Spring 2024Stanford AA203: Optimal and Learning-based Control - Spring 2023 |
|
Autonomous systems are increasingly central to modern society, deeply embedded in critical infrastructure, human-facing services, and scientific progress. From resilient power grids and intelligent transportation networks to cyber-physical workforces that augment human capabilities and coordinated fleets of aerial, terrestrial, and orbital robots, autonomy is rapidly moving from research prototypes to indispensable real-world operations. While the exact embodiments, safeguards, and degrees of agency will evolve, one fact is certain: persistent, trustworthy, and general-purpose autonomy will be essential. Recent advances in Artificial Intelligence (AI) have greatly accelerated this transformation, with machine learning (ML)-powered autonomy stacks now performing tasks previously considered beyond the capabilities of traditional, non-learning-based systems. Most notably, the emergence of internet-scale, broadly capable Foundation Models (FMs) offers an opportunity to fundamentally rethink how autonomous systems are designed, deployed, and operated. Trained on vast and diverse datasets, these models capture broad priors about the world and have achieved breakthroughs in vision, language, and multi-modal reasoning. However, delivering reliable, general-purpose autonomy presents unique challenges for AI systems. Autonomous systems must guarantee safety and reliability in real-world environments, often under conditions that cannot be anticipated at design time. They must also operate within the constraints of on-board compute and learn from only scarce embodiment-specific data. These stringent requirements stand in sharp contrast to the properties of current AI systems, which—despite their remarkable capabilities—depend on vast amounts of training data and large-scale compute, and remain vulnerable to hallucinations and brittle generalization. To that end, I address these challenges by employing and advancing techniques from AI/ML, control theory, and mathematical optimization. I apply the results to aerospace robotics, future mobility systems, and autonomy at large. For an updated list of my publications, visit my Google Scholar page. |
|
|
We present Space-LLaVA, initialized from a pre-trained LLaVA 13B model and fine-tuned to extraterrestrial applications on tasks such as, e.g., instruction-following, conversations constructed from three extraterrestrial datasets.
|
|
|
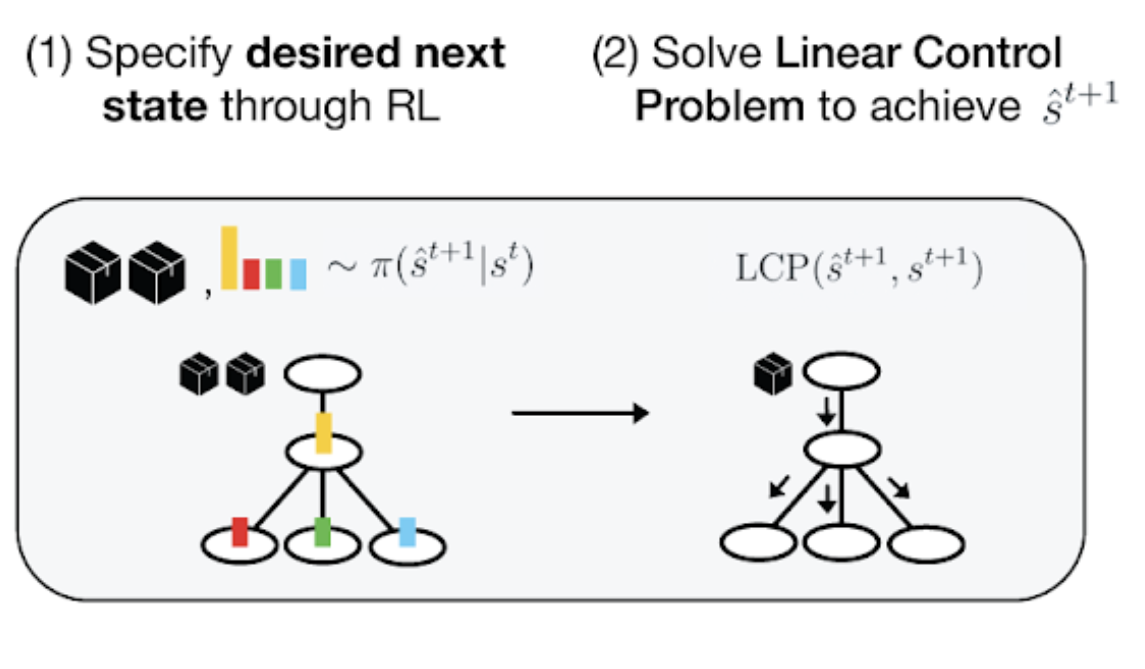
We propose OHIO: a framework for offline reinforcement learning (RL) of hierarchical policies. We demonstrate our framework on robotic and network optimization problems and show that it substantially outperforms end-to-end RL methods and improves robustness. We investigate a variety of instantiations of our framework, both in direct deployment of policies trained offline and when online fine-tuning is performed.
|
 |
We present a novel trajectory generation framework that generalizes across diverse problem configurations, by leveraging high-capacity transformer neural networks capable of learning from multimodal data sources. Specifically, our approach integrates transformer-based neural network models into the trajectory optimization process, encoding both scene-level information (e.g., obstacle locations, initial and goal states) and trajectory-level constraints (e.g., time bounds, fuel consumption targets) via multimodal representations.
|
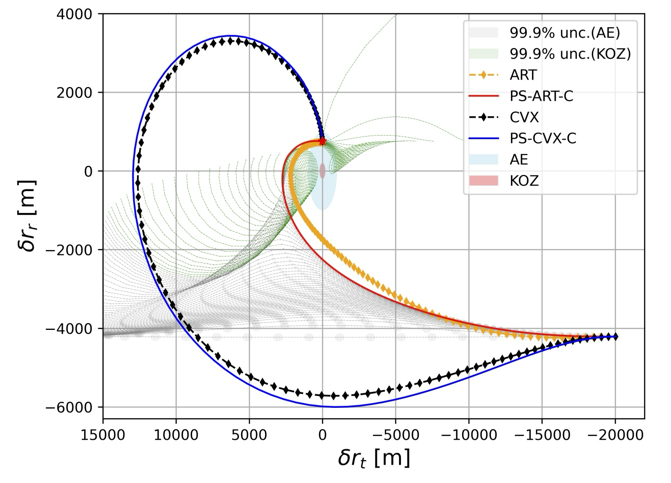 |
This work extends the capabilities of ART to address robust chance-constrained optimal control problems. Specifically, ART is applied to challenging rendezvous scenarios in Low Earth Orbit (LEO), ensuring fault-tolerant behavior under uncertainty. The proposed warm-starting strategy is shown to consistently produce high-quality reference trajectories, achieving up to 30% cost improvement and 50% reduction in infeasible cases compared to conventional methods, demonstrating robust performance across multiple state representations.
|
|
|
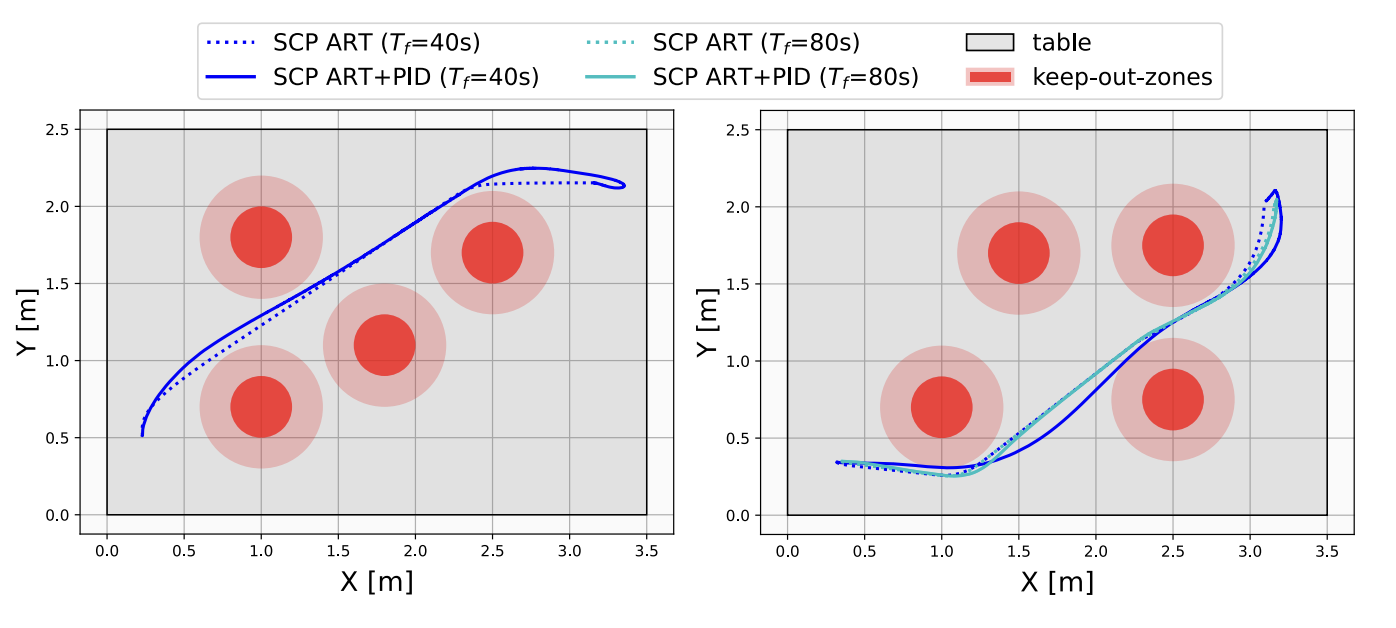
We present a unified framework to combine the main strengths of optimization-based and learning-based methods for MPC. Our experiments, performed in simulation and the real world onboard a free-flyer platform, demonstrate the capabilities of our framework to improve MPC convergence and runtime. Compared to purely optimization-based approaches, results show that our approach can improve trajectory generation performance by up to 70%, reduce the number of solver iterations by up to 45%, and improve overall MPC runtime by 7x without loss in performance.
|
 |
We introduce the Autonomous Rendezvous Transformer (ART) for spacecraft trajectory optimization. ART combines optimization-based and AI-based methods, which improves task performance while providing the safety assurances needed for space operations. The method entails embedding high-capacity (namely, transformer-based) neural network models within the optimization process for trajectory generation.
|
 |
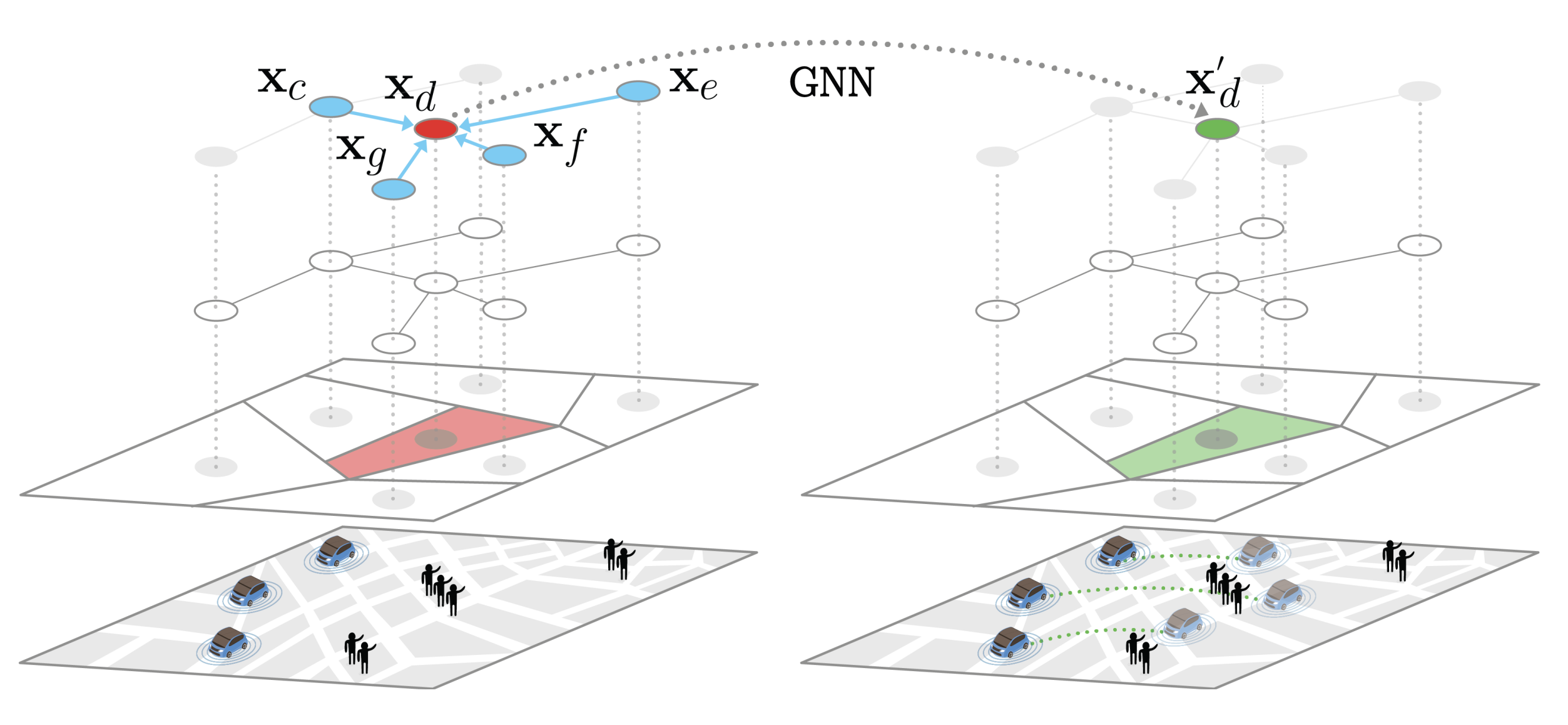
We propose a learning-based framework to handle a broad class of network problems by exploiting the main strengths of graph representation learning, reinforcement learning, and classical operations research tools.
|
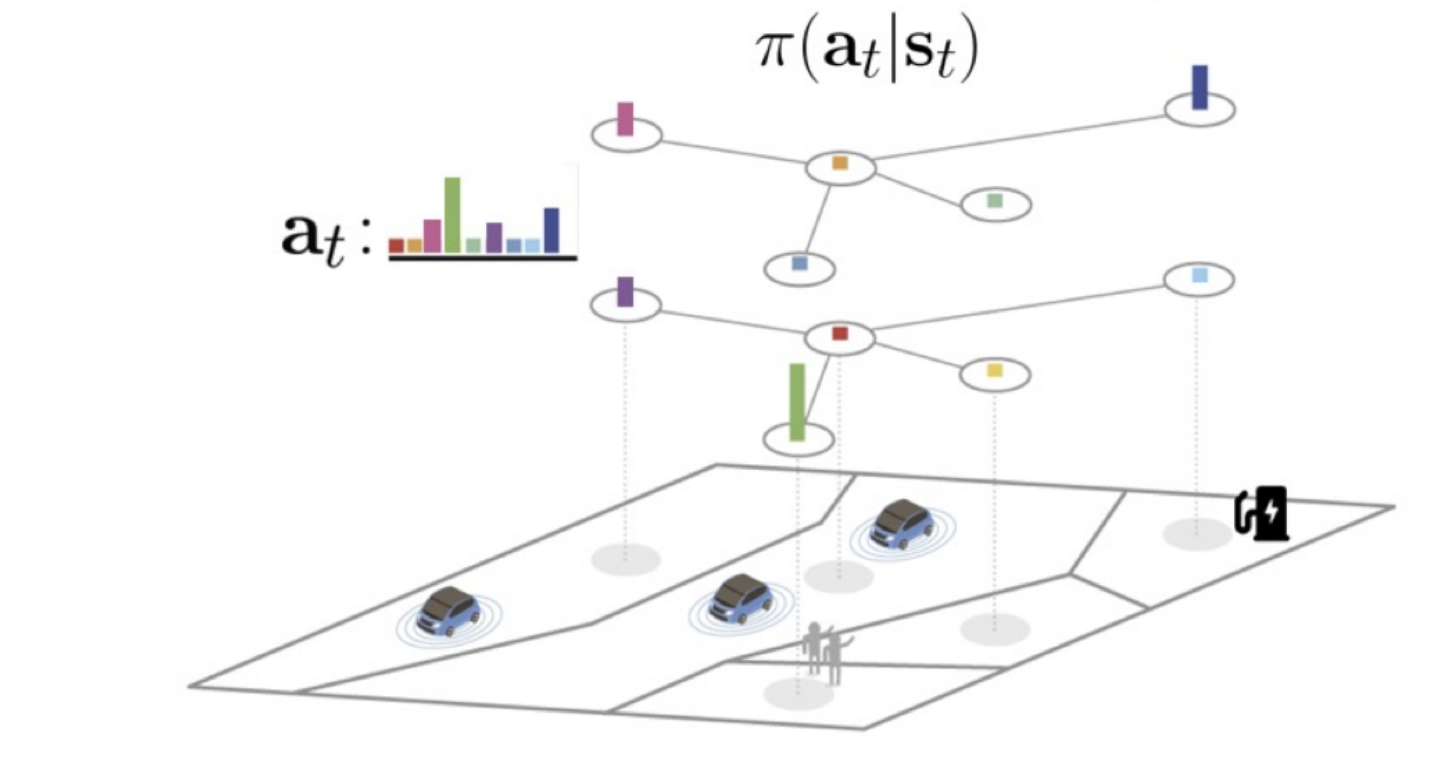 |
We present the E-AMoD control problem through the lens of reinforcement learning and propose a graph network-based framework to achieve drastically improved scalability and performance over heuristics.
|
|
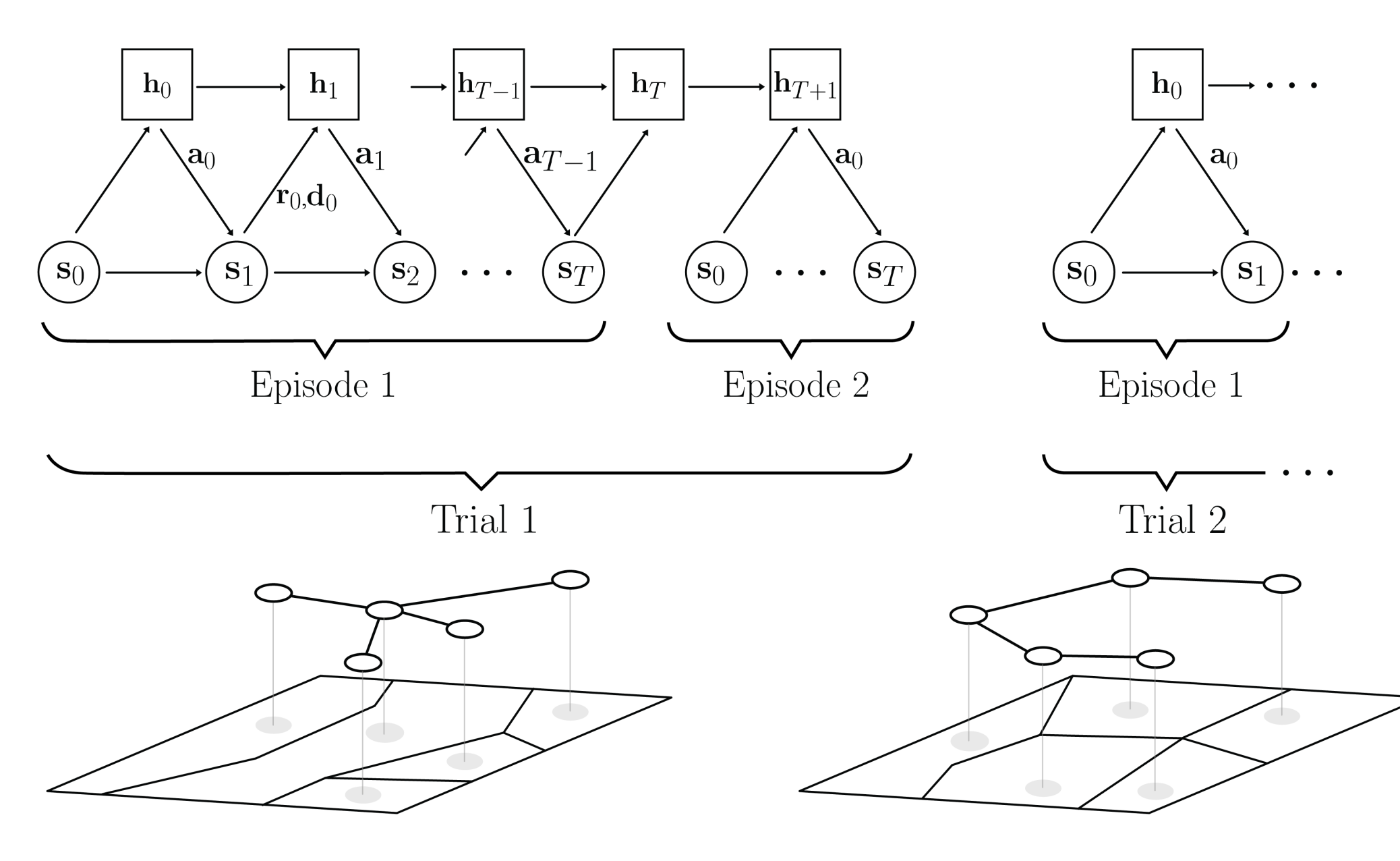
We formalize the multi-city AMoD problem through the lens of meta-reinforcement learning and devise an RL agent based on recurrent graph neural networks. In our approach, AMoD controllers are explicitly trained such that a small amount of experience within a new city will produce good system performance.
|
|
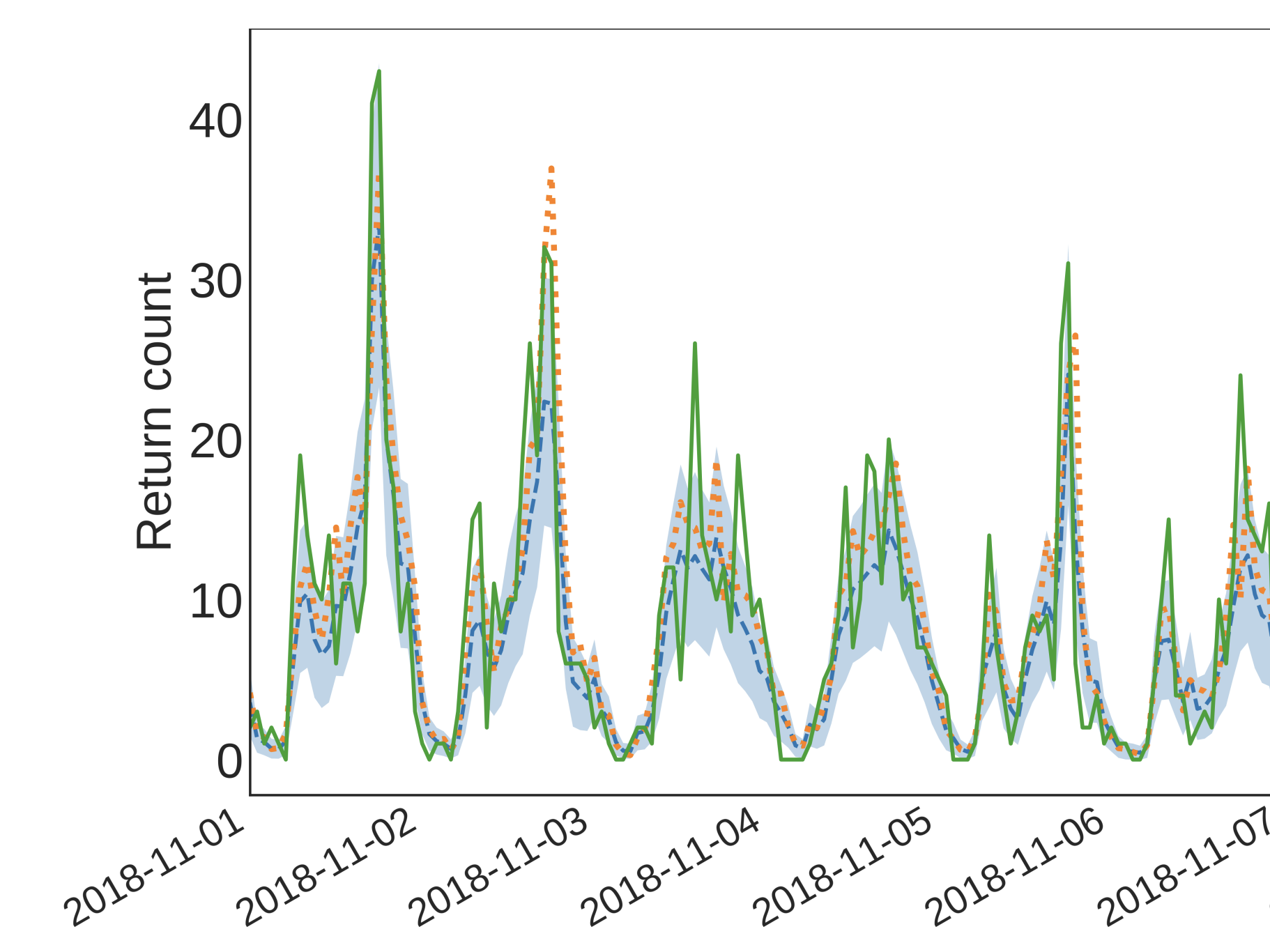
We devise a deep generative model to forecast future pickup and return rates for shared mobility services. We show how more accurate predictions do not necessarily translate into better inventory decisions. By providing insights into the interplay between forecasts, model assumptions, and decisions, we point out that forecasts and decision models should be carefully evaluated and harmonized to optimally control shared mobility systems.
|
|
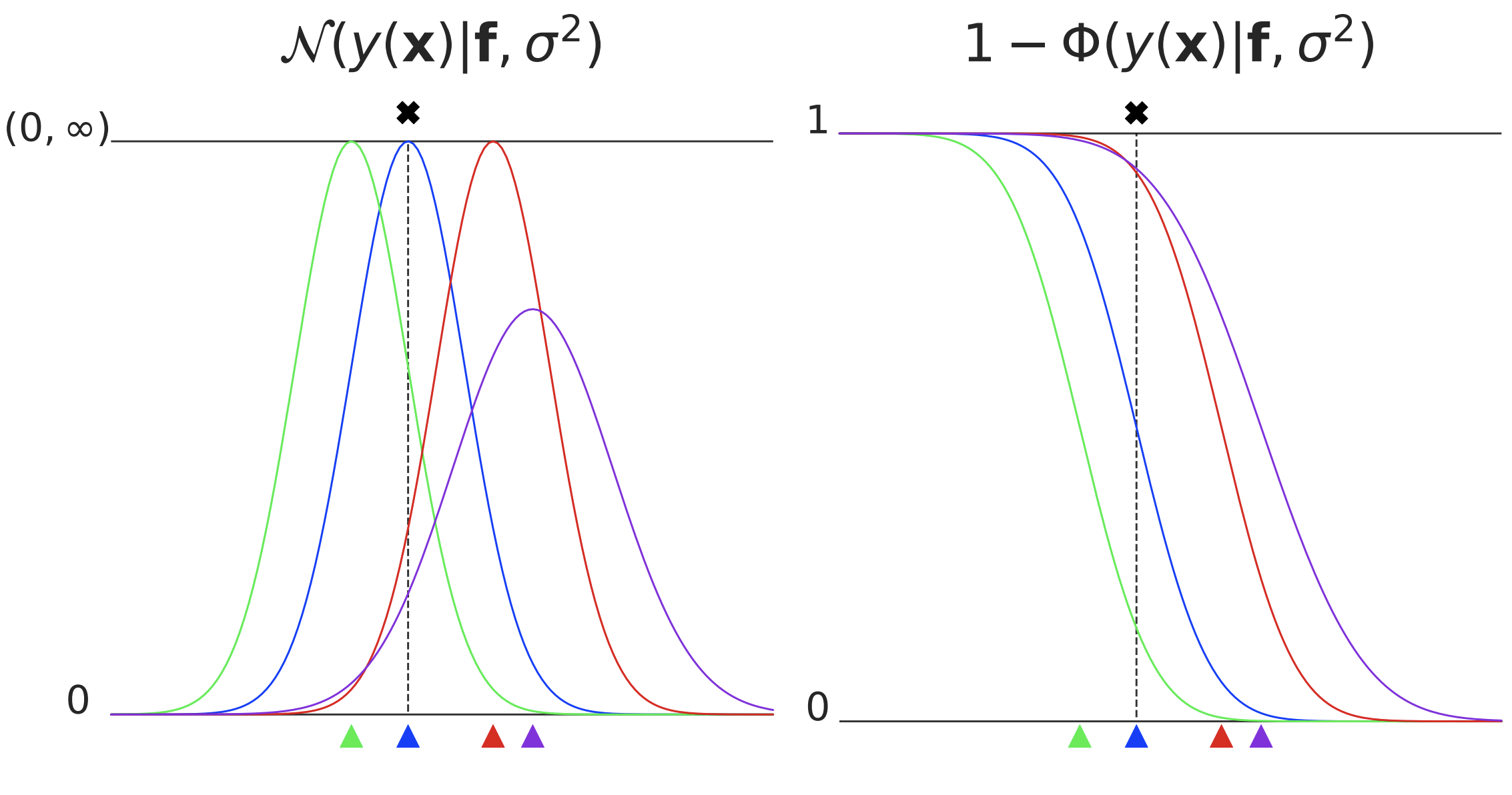
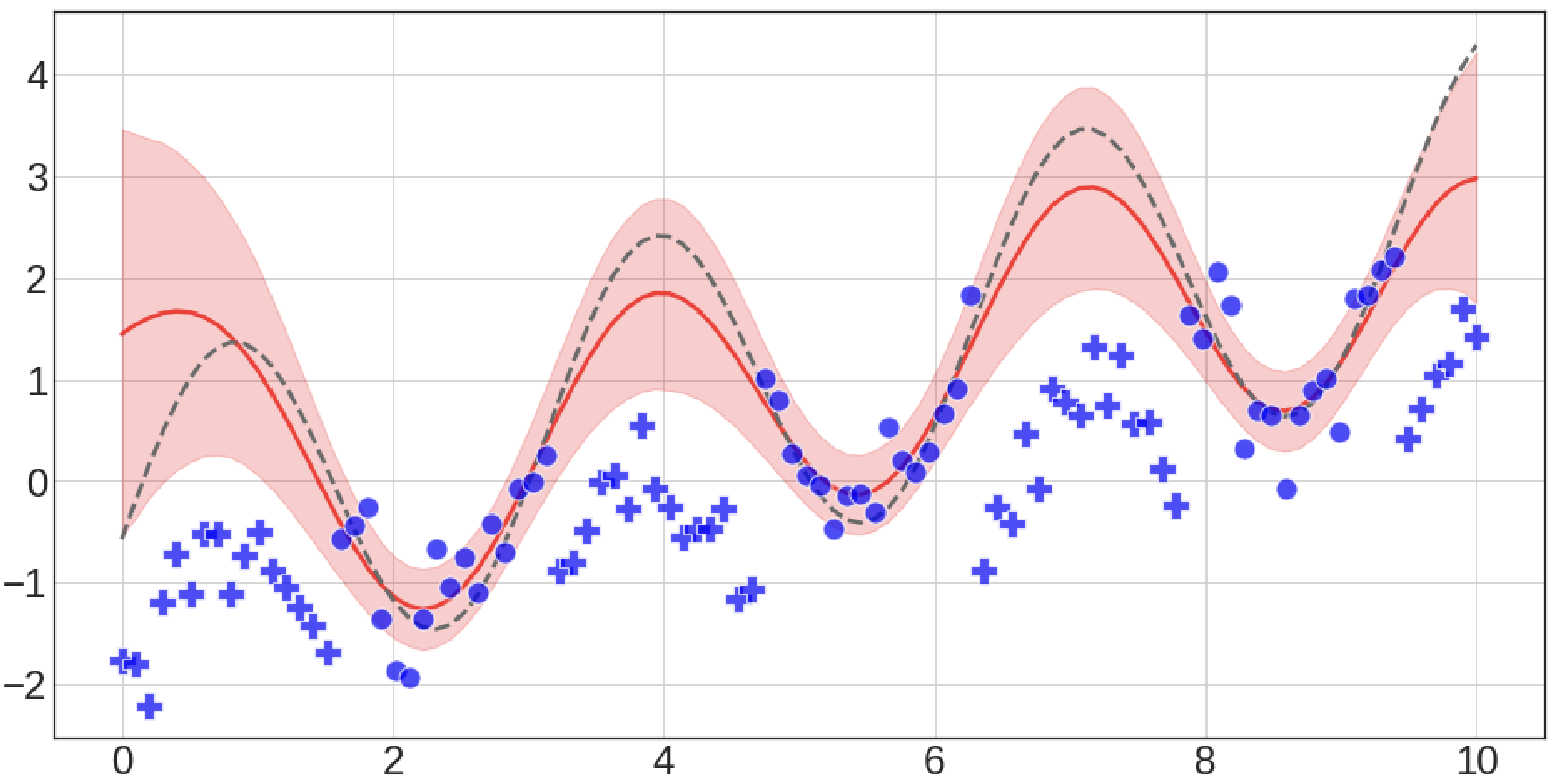
We propose a novel extension to the multi-output Gaussian process framework that leverages information from multiple correlated outputs to address the censoring problem. We further position the proposed model into a general framework capable of dealing with arbitrary likelihood functions for the purpose of censored modelling.
|
|
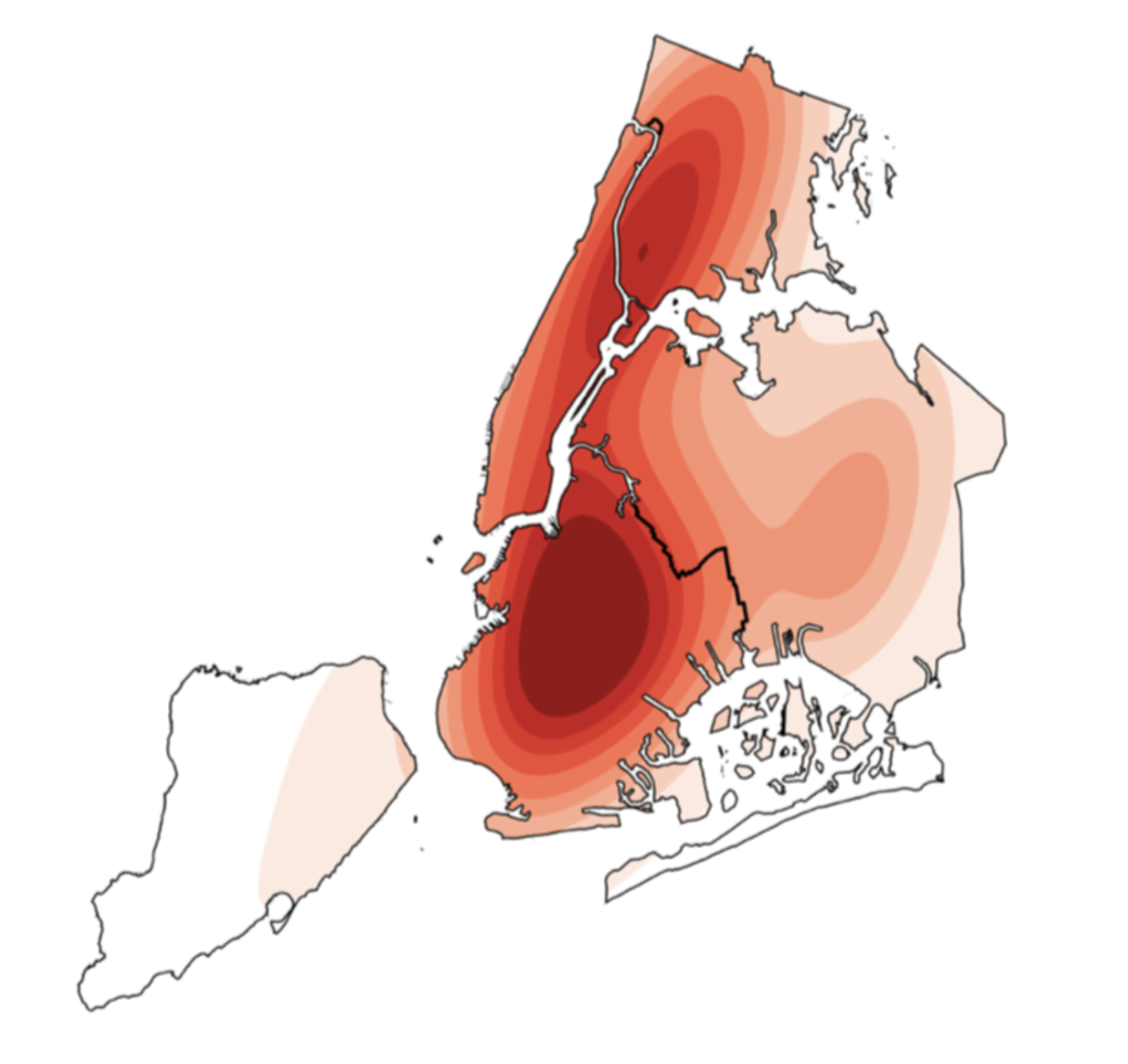
We introduce recurrent flow networks (RFN) for spatio-temporal data prediction by explicitly disentangling between temporal and spatial variability.
|
|
We propose a deep reinforcement learning framework to control the rebalancing of AMoD systems through graph neural networks. Crucially, we demonstrate that graph neural networks enable reinforcement learning agents to recover behavior policies that are significantly more transferable, generalizable, and scalable than policies learned through other approaches.
|
|
We propose a general method for censorship-aware modeling, for which we devise a censored likelihood function. We apply this method to the task of shared mobility demand prediction by incorporating the censored likelihood within a Gaussian Process model, which can flexibly approximate arbitrary functional forms.
|
|
|