|
I am a postdoc at Stanford University, where I work with Marco Pavone on deep learning, reinforcement learning and robotics, with an emphasis on autonomous aerospace vehicles and future mobility systems. I completed my PhD at the Technical University of Denmark (DTU), working with Francisco Camara Pereira, Filipe Rodrigues, and Dario Pacino. During my PhD, I was fortunate to spend my time in the Machine Learning for Smart Mobility Lab. Before my PhD, I spent some time in Amazon's Operations Research Team. |

|
|
I am interested in the capability of autonomous agents to develop broadly intelligent behavior through learning and interaction, aiming for a reliable and beneficial deployment of AI in the real world. |
|
|
|
Stanford AA203: Optimal and Learning-based Control - Spring 2023 |
|
Tutorial on Graph Reinforcement Learning - Center for Automotive Research at Stanford Learning and Control for Adaptive Transportation Systems - PhD Thesis |
|
I am interested in the capability of autonomous agents to develop broadly intelligent behavior through learning and interaction, aiming for a reliable and beneficial deployment of AI in the real world. Towards this goal, I focus on machine learning, reinforcement learning, and optimal control for decision-making. |
|
We introduce the Autonomous Rendezvous Transformer (ART) for spacecraft trajectory optimization. ART combines optimization-based and AI-based methods, which improves task performance while providing the safety assurances needed for space operations. The method entails embedding high-capacity (namely, transformer-based) neural network models within the optimization process for trajectory generation.
|
|
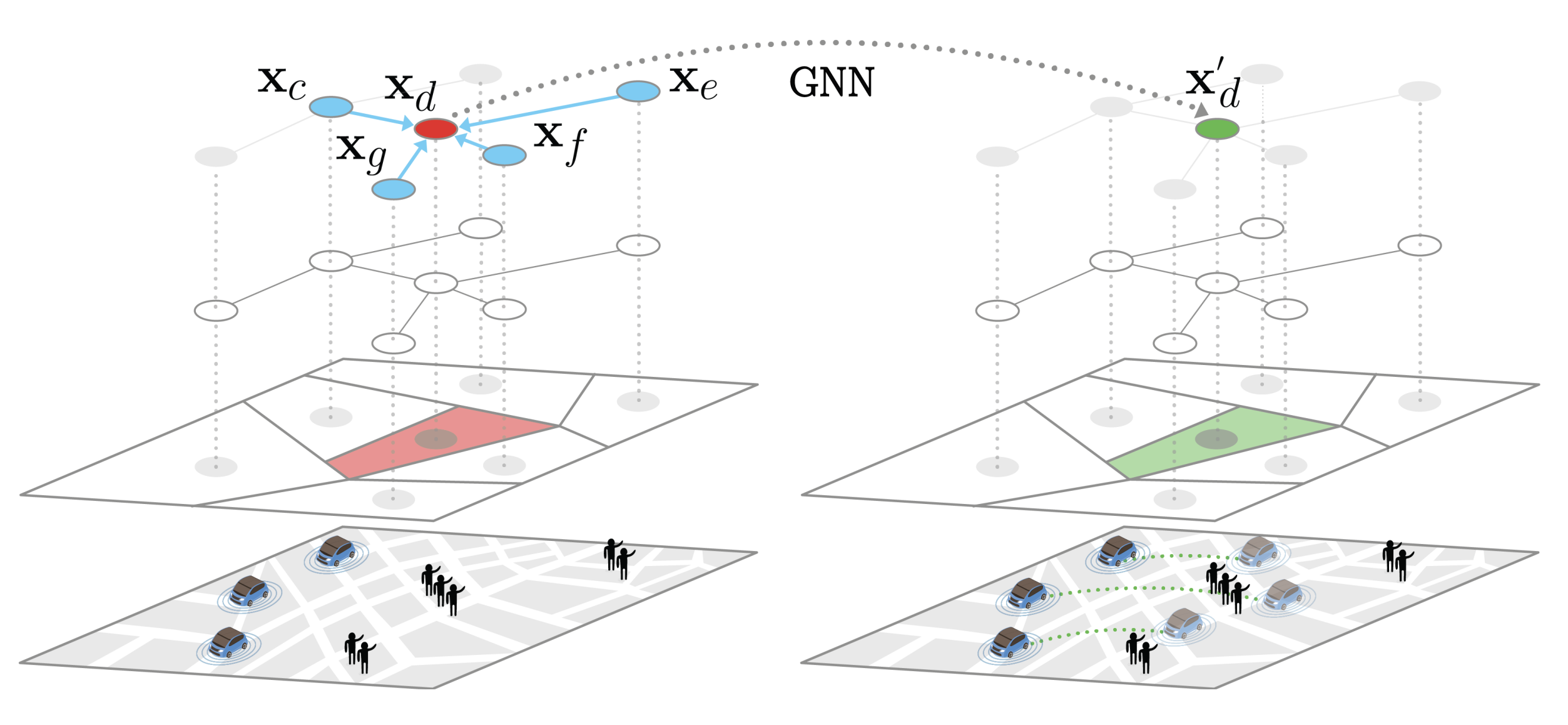
We propose a learning-based framework to handle a broad class of network problems by exploiting the main strengths of graph representation learning, reinforcement learning, and classical operations research tools.
|
|
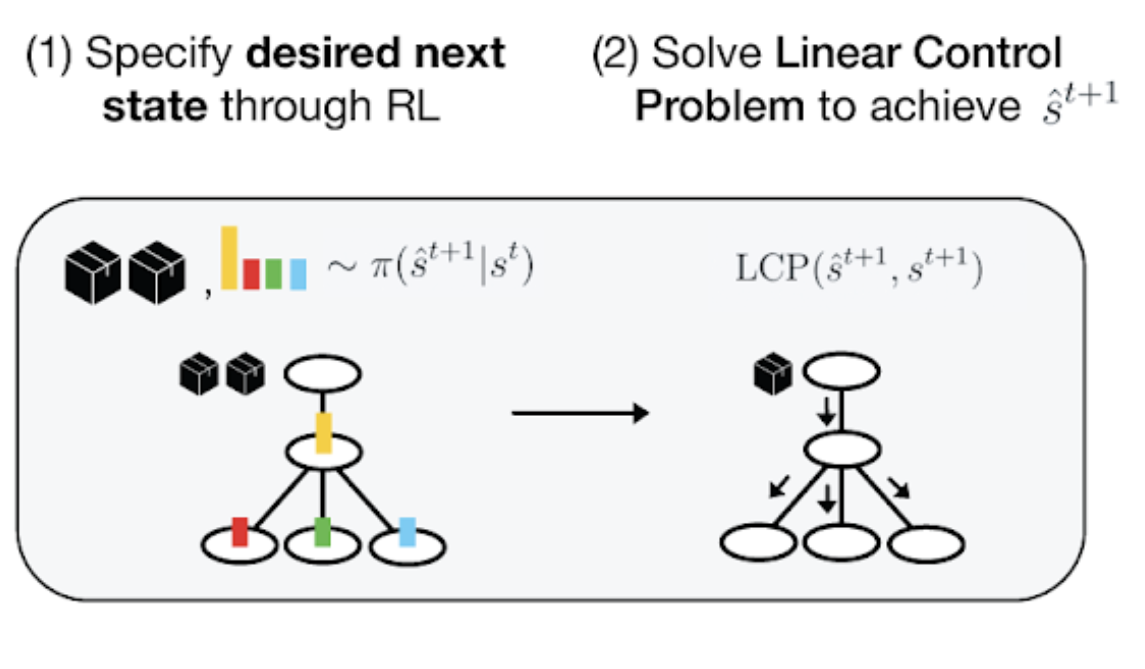
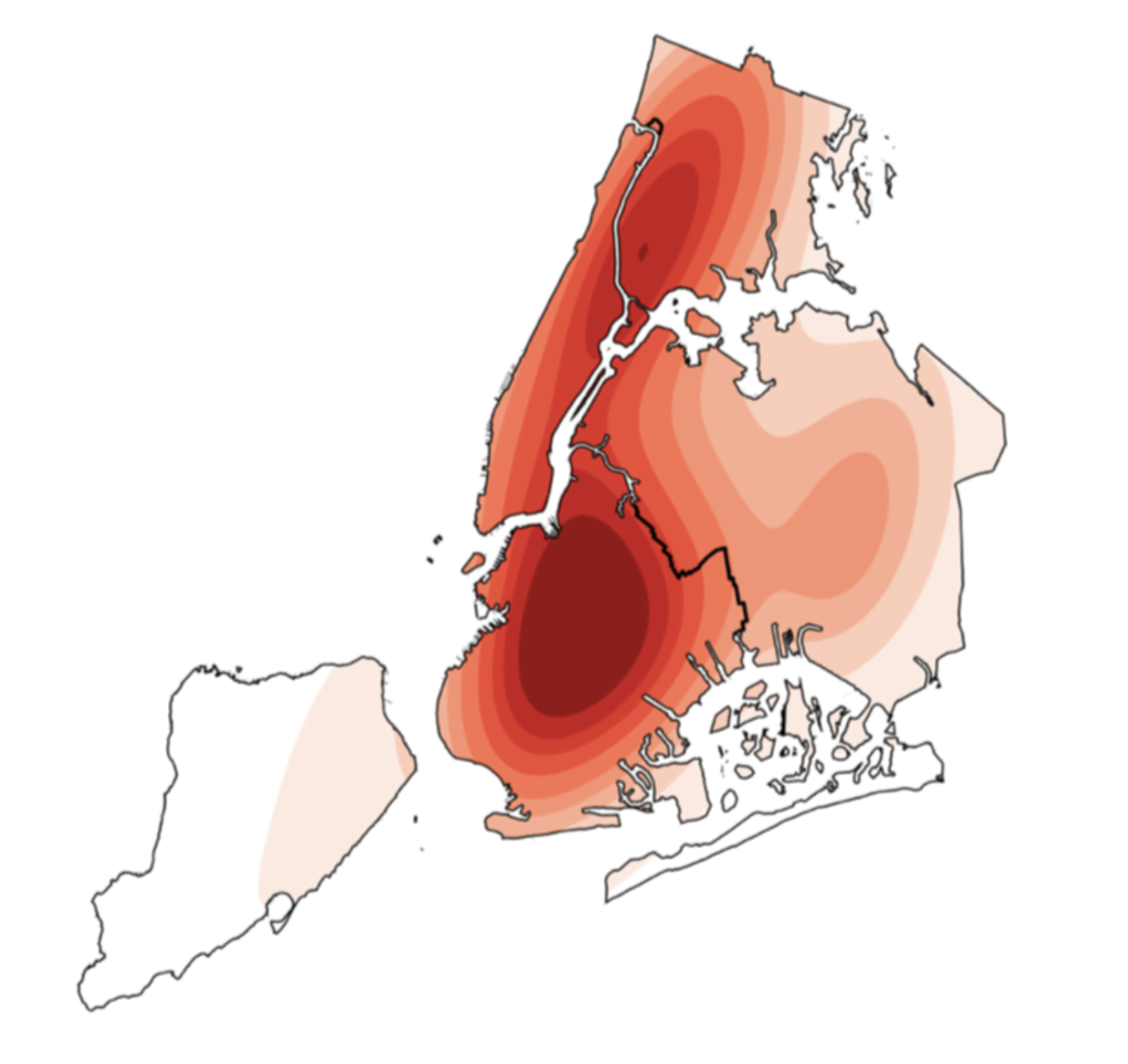
We present the E-AMoD control problem through the lens of reinforcement learning and propose a graph network-based framework to achieve drastically improved scalability and performance over heuristics.
|
|
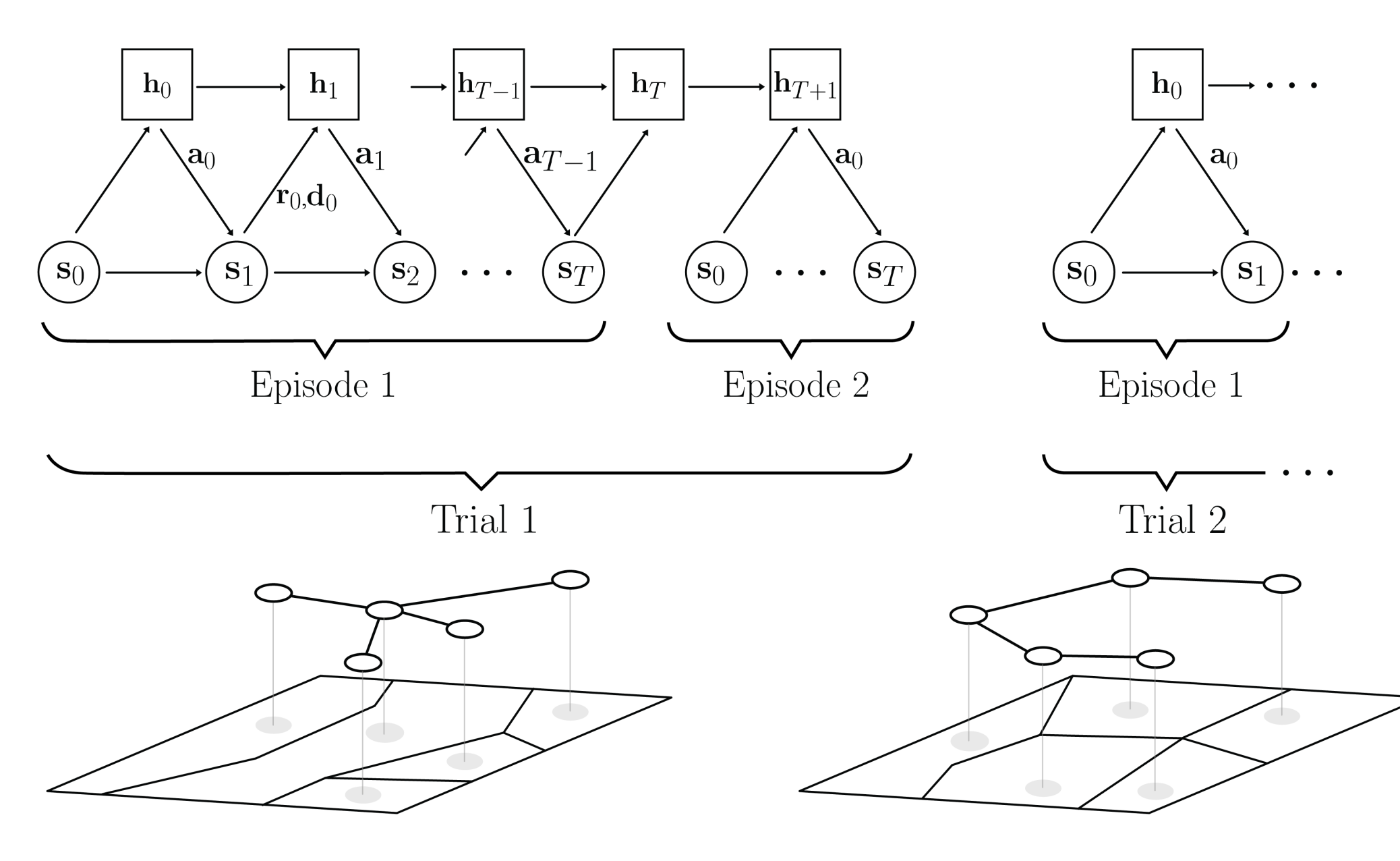
We formalize the multi-city AMoD problem through the lens of meta-reinforcement learning and devise an RL agent based on recurrent graph neural networks. In our approach, AMoD controllers are explicitly trained such that a small amount of experience within a new city will produce good system performance.
|
|
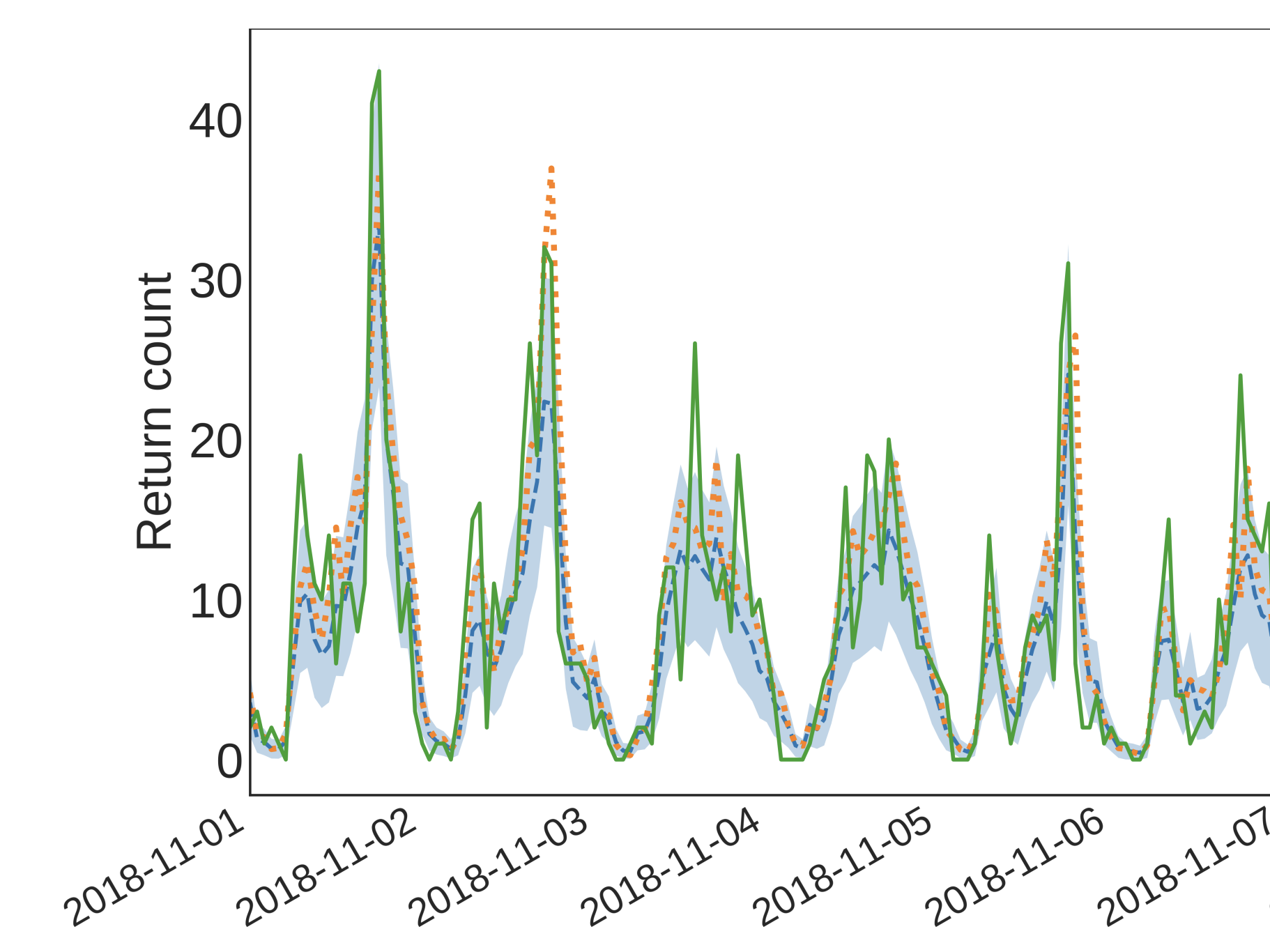
We devise a deep generative model to forecast future pickup and return rates for shared mobility services. We show how more accurate predictions do not necessarily translate into better inventory decisions. By providing insights into the interplay between forecasts, model assumptions, and decisions, we point out that forecasts and decision models should be carefully evaluated and harmonized to optimally control shared mobility systems.
|
|
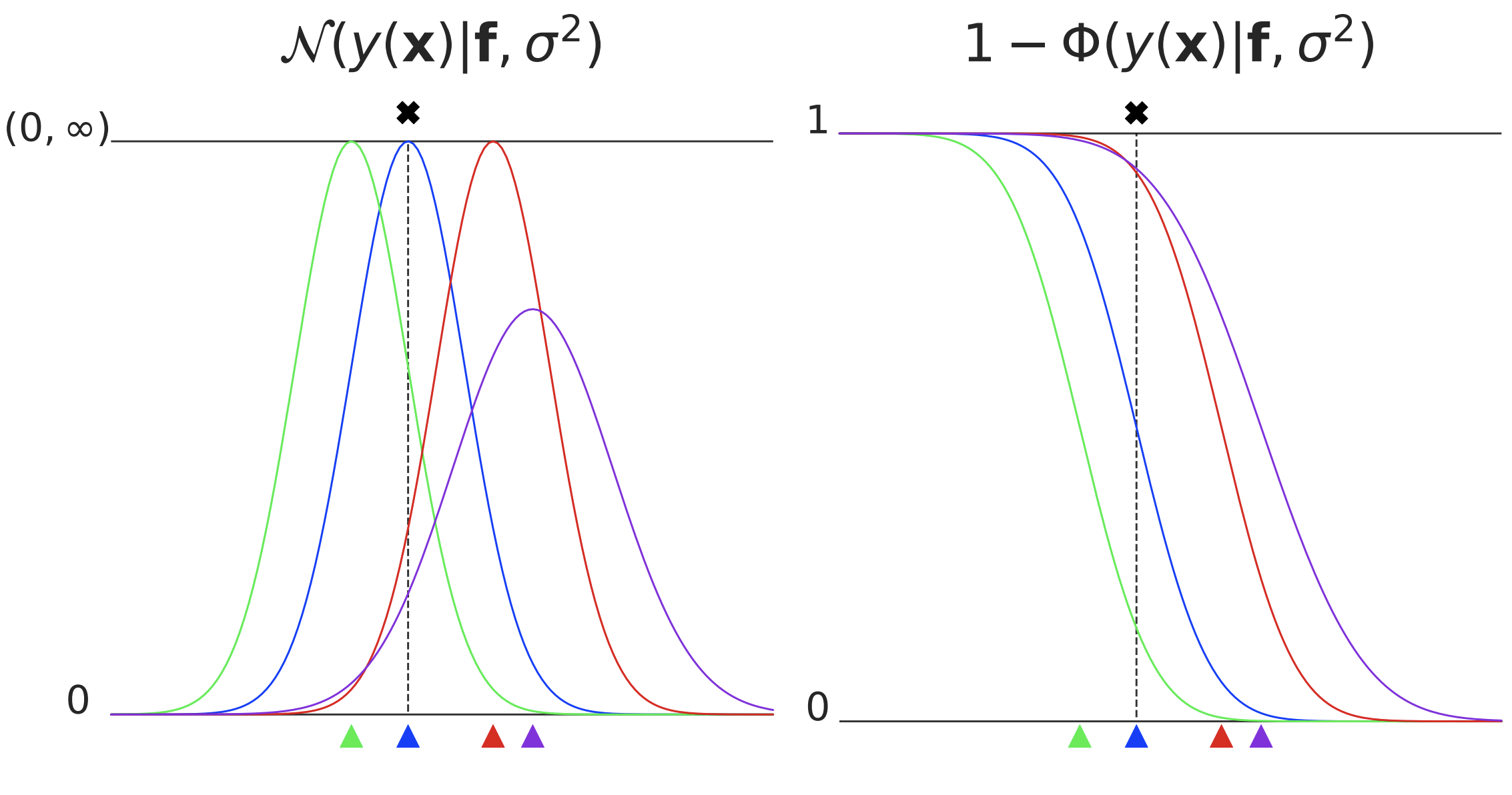
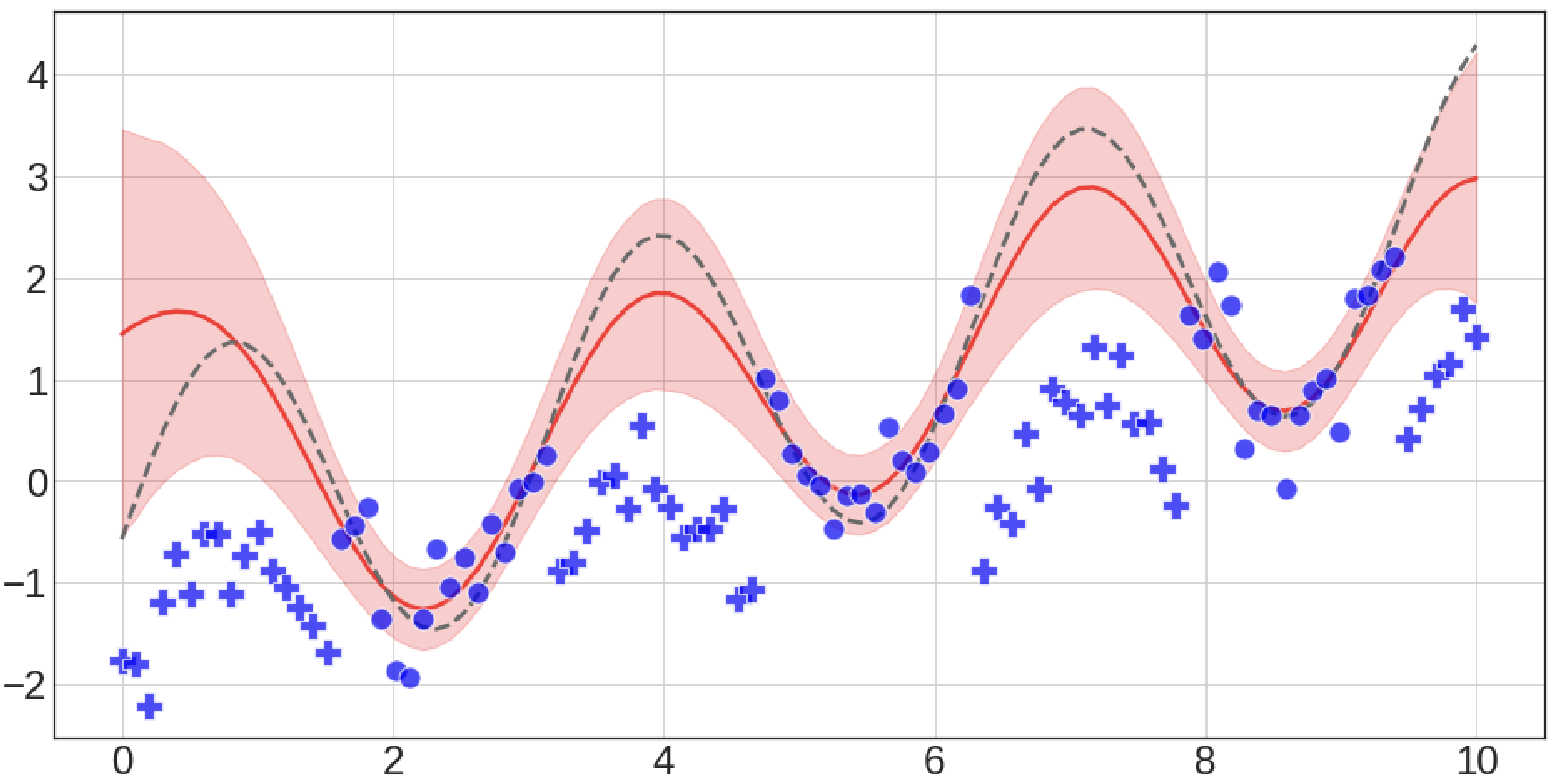
We propose a novel extension to the multi-output Gaussian process framework that leverages information from multiple correlated outputs to address the censoring problem. We further position the proposed model into a general framework capable of dealing with arbitrary likelihood functions for the purpose of censored modelling.
|
|
We introduce recurrent flow networks (RFN) for spatio-temporal data prediction by explicitly disentangling between temporal and spatial variability.
|
|
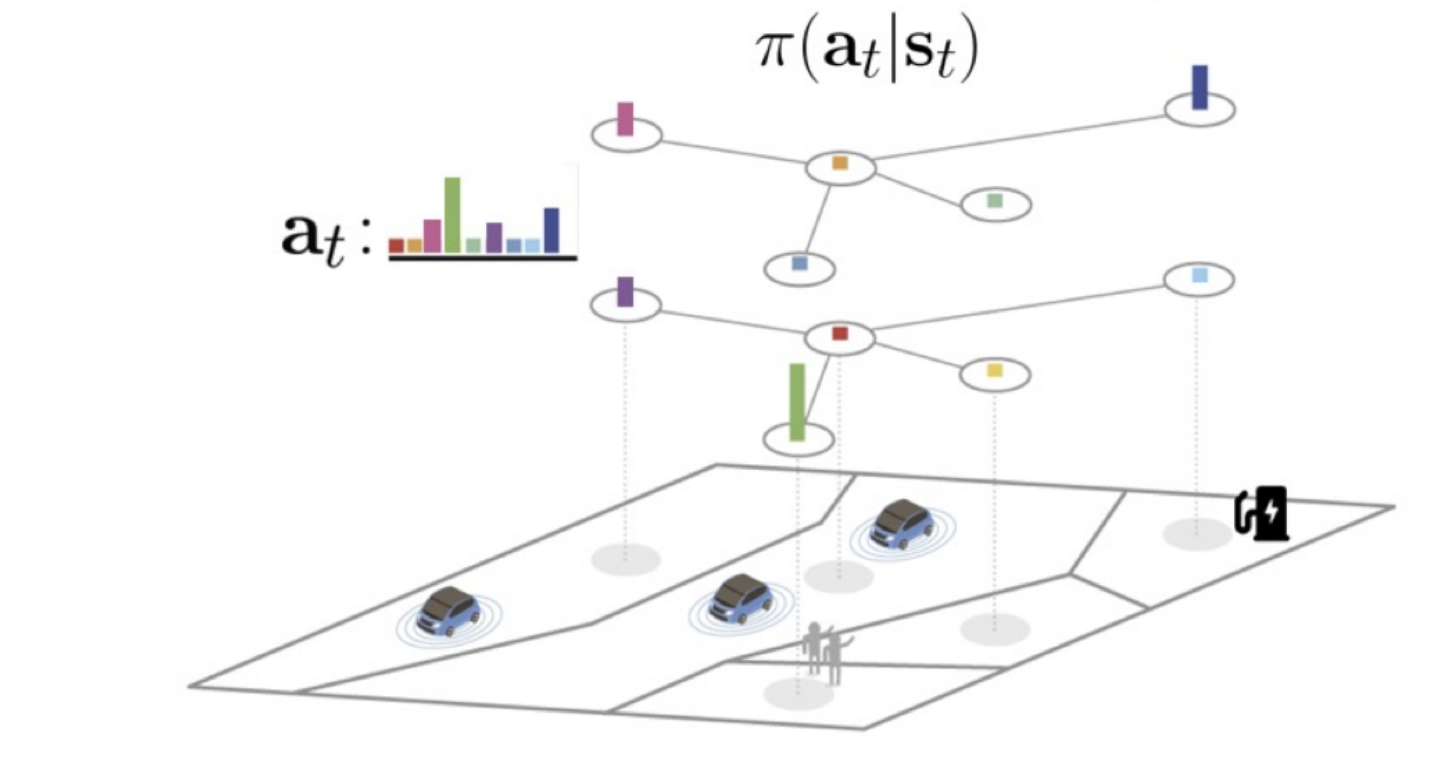
We propose a deep reinforcement learning framework to control the rebalancing of AMoD systems through graph neural networks. Crucially, we demonstrate that graph neural networks enable reinforcement learning agents to recover behavior policies that are significantly more transferable, generalizable, and scalable than policies learned through other approaches.
|
|
We propose a general method for censorship-aware modeling, for which we devise a censored likelihood function. We apply this method to the task of shared mobility demand prediction by incorporating the censored likelihood within a Gaussian Process model, which can flexibly approximate arbitrary functional forms.
|
|
|